还剩27页未读,
继续阅读
中考科学 二轮专题 专题19 简单机械 学案
展开
这是一份中考科学 二轮专题 专题19 简单机械 学案,共30页。学案主要包含了思维导图,知识点回顾,例题精析,制作步骤,交流评价,习题巩固等内容,欢迎下载使用。
专题19 简单机械
【思维导图】
【知识点回顾】
一、杠杆
考点1 指认杠杆的支点、动力、阻力、动力臂和阻力臂
1.杠杆的定义:在力的作用下,能绕固定点转动的硬棒叫做杠杆。杠杆可以是直的、也可以是弯的。
2.杠杆的五要素:________、动力、阻力、动力臂、阻力臂。
3.动力和阻力的方向不一定相反,但作用效果一定相反。
1.力臂是________的距离,而不是支点到力的作用点的距离。
2.作力臂的步骤
a.找出支点O的位置;
b.画出动力作用线和阻力作用线;
c.从支点分别作动力作用线和阻力作用线的垂线段即为________和________。
1.杠杆保持________或________状态,称为杠杆平衡。
2.杠杆平衡的条件
动力×动力臂=阻力×阻力臂,即________。
杠杆类型
力臂关系
平衡时力的关系
优缺点
应用
省力杠杆
l1>l2
________
省力,费距离
撬棒、瓶盖起子等
费力杠杆
l1
________,省距离
镊子、火钳等
等臂杠杆
l1=l2
F1=F2
不省力,不省距离
天平、定滑轮等
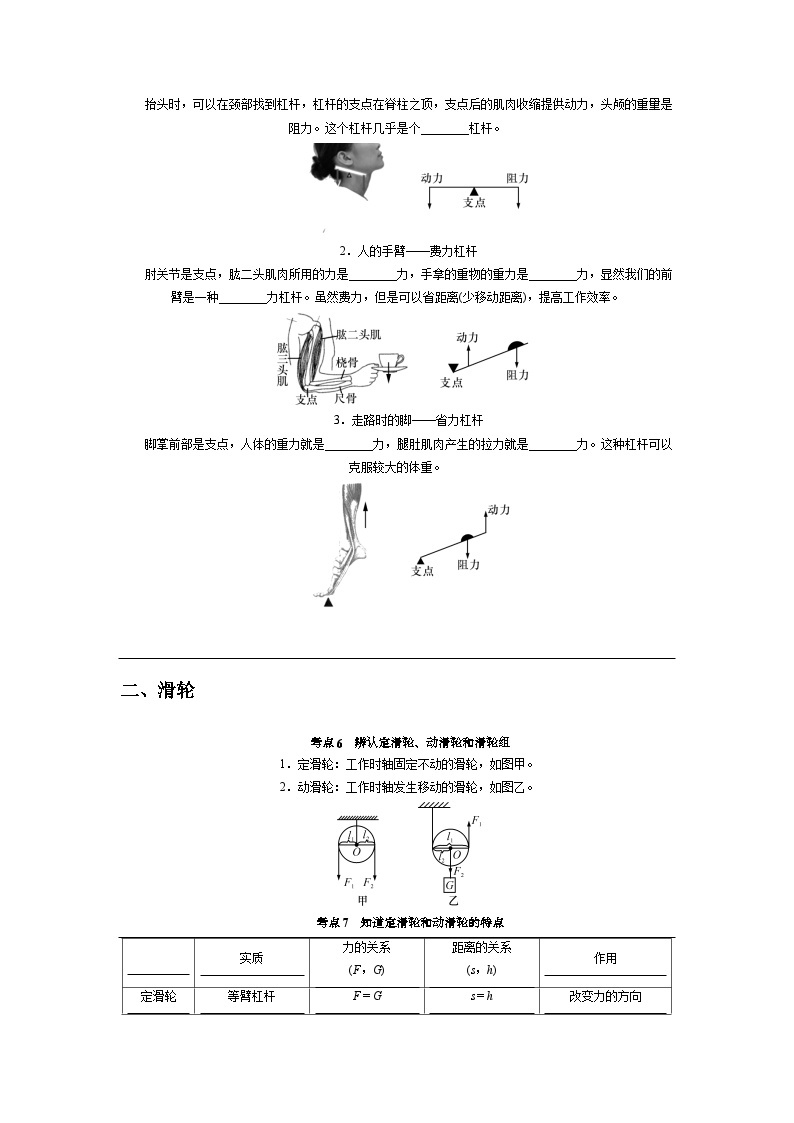
1.人的头颅——等臂杠杆
抬头时,可以在颈部找到杠杆,杠杆的支点在脊柱之顶,支点后的肌肉收缩提供动力,头颅的重量是阻力。这个杠杆几乎是个________杠杆。
2.人的手臂——费力杠杆
肘关节是支点,肱二头肌肉所用的力是________力,手拿的重物的重力是________力,显然我们的前臂是一种________力杠杆。虽然费力,但是可以省距离(少移动距离),提高工作效率。
3.走路时的脚——省力杠杆
脚掌前部是支点,人体的重力就是________力,腿肚肌肉产生的拉力就是________力。这种杠杆可以克服较大的体重。
二、滑轮
1.定滑轮:工作时轴固定不动的滑轮,如图甲。
2.动滑轮:工作时轴发生移动的滑轮,如图乙。
实质
力的关系
(F,G)
距离的关系
(s,h)
作用
定滑轮
等臂杠杆
F=G
s=h
改变力的方向
动滑轮
动力臂是阻力臂两倍的杠杆
F=G
s=________
省力
滑轮组
F=
________
s=nh
既可以省力,也可以改变力的方向
1.滑轮组:由定滑轮跟动滑轮组成的滑轮组。
2.特点:既能改变用力的________,也能________。
考点9 使用滑轮组(限于两个滑轮的滑轮组)解决简单的问题
使用滑轮组时,滑轮组用n段绳子拉物体,拉物体所用的力F就是物重的n分之一,即F=________,n表示拉物体绳子数。
考点1 2.支点
考点2 1.支点到力的作用线 2.动力臂 阻力臂
考点3 1.静止 匀速转动 2.F1l1=F2l2
考点4 F1
考点7 2h G
考点8 2.方向 省力
考点9 G/n
【例题精析】
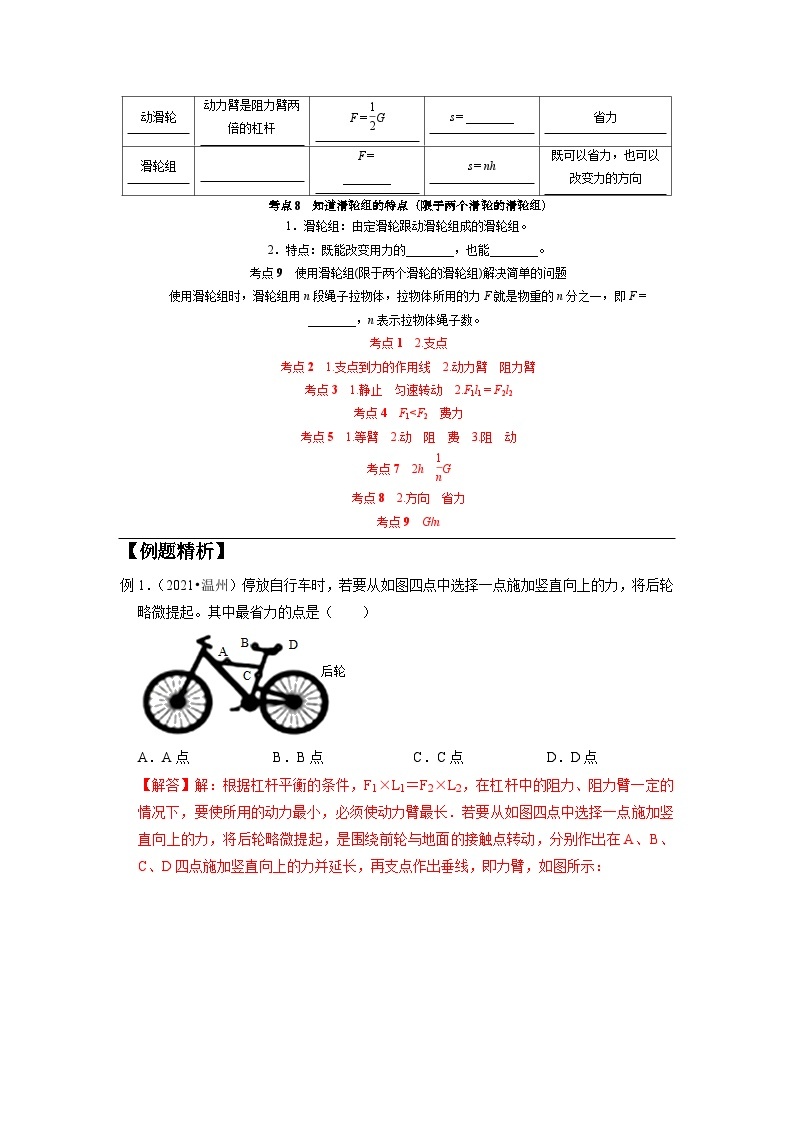
例1.(2021•温州)停放自行车时,若要从如图四点中选择一点施加竖直向上的力,将后轮略微提起。其中最省力的点是( )
A.A点 B.B点 C.C点 D.D点
【解答】解:根据杠杆平衡的条件,F1×L1=F2×L2,在杠杆中的阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长.若要从如图四点中选择一点施加竖直向上的力,将后轮略微提起,是围绕前轮与地面的接触点转动,分别作出在A、B、C、D四点施加竖直向上的力并延长,再支点作出垂线,即力臂,如图所示:
由图可知最省力的点是D。
故选:D。
例2.(2021•金华)生活中处处有科学。下列日常工具在使用时属于费力杠杆的是( )
A.独轮车 B.开瓶器
C.钓鱼竿 D.大铡刀
【解答】解:A、独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不合题意;
B、开瓶器在使用过程中,动力臂大于阻力臂,是省力杠杆,故B不合题意;
C、钓鱼竿在使用时,动力臂小于阻力臂,是费力杠杆,故C符合题意;
D、大铡刀在使用过程中,动力臂大于阻力臂,是省力杠杆,故D不合题意。
故选:C。
例3.(2020•宁波)现有一根形变不计、长为L的铁条AB和两根横截面积相同、长度分别为La、Lb的铝条a、b,将铝条a叠在铁条AB上,并使它们的右端对齐,然后把它们放置在三角形支架O上,AB水平平衡,此时OB的距离恰好为La,如图所示。取下铝条a后,将铝条b按上述操作方法使铁条AB再次水平平衡,此时OB的距离为Lx.下列判断正确的是( )
A.若La<Lb<L,则La<Lx<La+Lb2成立
B.若La<Lb<L,则Lx>La+Lb2成立
C.若Lb<La,La+Lb2<Lx<La成立
D.若Lb<La,则Lx<La+Lb2成立
【解答】解:由题意可知,将铝条a叠在铁条AB上,并使它们的右端对齐,然后把它们放置在三角形支架O上,AB水平平衡,此时OB的距离恰好为La,
(1)如下图所示,若La<Lb<L,用铝条b替换铝条a就相当于在铝条a左侧放了一段长为Lb﹣La、重为Gb﹣Ga的铝条,
这一段铝条的重心距B端的长度为La+Lb−La2=La+Lb2,
而铁条AB和铝条a组成的整体的重心在支架原来的位置,距B端的长度为La,
要使铁条AB水平平衡,由杠杆的平衡条件F1L1=F2L2可知,支架O应移到上述两个重心之间,
即La<Lx<La+Lb2,故A正确、B错误;
(2)如下图所示,若Lb<La,用铝条b替换铝条a就相当于从铝条a左侧截掉一段长为La﹣Lb、重为Ga﹣Gb的铝条,
也相当于距B端Lb+La−Lb2=La+Lb2处施加一个竖直向上的力,其大小等于Ga﹣Gb,
由杠杆的平衡条件F1L1=F2L2可知,要使铁条AB水平平衡,支架O应向A端移动,则Lx>La,故C错误;
由Lb<La可知,Lx>La=La+La2>La+Lb2,故D错误。
故选:A。
例4.(2019•绍兴)如图是上肢力量健身器示意图,杠杆AB可绕O点在竖直平面内转动,AB=3BO,配重的重力为120牛,重力为500牛的健身者通过细绳在B点施加竖直向下的拉力为F1时,杠杆在水平位置平衡,配重对地面的压力为85牛,在B点施加竖直向下的拉力为F2时,杠杆仍在水平位置平衡,配重对地面的压力为60牛。已知F1:F2=2:3,杠杆AB和细绳的质量及所有摩擦均忽略不计,下列说法正确的是( )
A.配重对地面的压力为50牛时,健身者在B点施加竖直向下的拉力为160牛
B.配重对地面的压力为90牛时,健身者在B点施加竖直向下的拉力为120牛
C.健身者在B点施加400牛竖直向下的拉力时,配重对地面的压力为35牛
D.配重刚好被匀速拉起时,健身者在B点施加竖直向下的拉力为540牛
【解答】解:
当配重在地面上保持静止状态时,它受到的绳子的拉力F为:F=G﹣FN;
因为动滑轮上有2段绳子承担物重,
因此杠杆A点受到的拉力:FA=2F+G动=2×(G﹣FN)+G动;
根据杠杆的平衡条件得到:FA×OA=FB×OB;
即【2×(G﹣FN)+G动】×OA=FB×OB,
因为:AB=3BO;
所以:AO=2BO;
那么【2×(G﹣FN)+G动】×2=FB×1,
即FB=4×(G﹣FN)+2G动;
当压力为85N时,F1=4×(120N﹣85N)+2G动;
当压力为60N时,F2=4×(120N﹣60N)+2G动;
因为:F1:F2=2:3;
所以:4×(120N−85N)+2G动4×(120N−60N)+2G动=23;
解得:G动=30N;
A.当配重对地面的压力为50N时,B点向下的拉力为:
FB=4×(G﹣FN)+2G动=FB=4×(120N﹣50N)+2×30N=340N,故A错误;
B.当配重对地面的压力为90N时,B点向下的拉力为:
FB=4×(G﹣FN)+2G动=FB=4×(120N﹣90N)+2×30N=180N,故B错误;
C.健身者在B点施加400N竖直向下的拉力时,
根据FB=4×(G﹣FN)+2G动得到:
400N=4×(120N﹣FN)+2×30N;
解得:FN=35N,故C正确;
D.配重刚好被拉起,即它对地面的压力为0,
根据FB=4×(G﹣FN)+2G动得到:
FB=4×(120N﹣0N)+2×30N=540N>500N;
因为人的最大拉力等于体重500N,因此配重不可能匀速拉起,故D错误。
故选:C。
例5.(2020•金华)简单机械广泛应用于日常生活。某小区物业为了方便住户扔垃圾,对垃圾桶进行了简易改装(如图甲)。被拉起的垃圾桶盖可看成是一个简易杠杆。图乙为桶盖与绳子成90°角且处于静止状态时的示意图,O为杠杆支点,A为绳子拉力F的作用点,B为桶盖的重心。
根据图乙回答下列问题:
(1)定滑轮的作用是 改变力的方向 ;
(2)该状态下的桶盖属于 省力 (填“省力”、“费力”或“等臂”)杠杆。
【解答】解:(1)定滑轮的作用是可以改变力的方向;
(2)由图可知,垃圾桶盖使用过程中,动力臂大于阻力臂,属于省力杠杆。
故答案为:(1)改变力的方向;(2)省力。
例6.(2021•湖州)下列是某科学研究小组探究杠杆平衡条件的实验过程:(本实验均使用轻质杠杆)
实验1:在直杠杆水平平衡时(如图甲所示)进行实验,记录多组数据。得出:F1×s1=F2×s2(注:s1和s2分别表示支点O到F1和F2的作用点的距离)。在直杠杆倾斜平衡时(如图乙所示)进行实验,也得到了同样的结论。
该结论适用于所有平衡时的杠杆吗?
实验2:科学研究小组用一侧弯曲的杠杆进行如图丙所示的实验,移动钩码,改变钩码数量,记录数据如表,分析表格数据发现上述结论并不成立,但发现一个新的等量关系,即: F1×s1=F2×l2 。
实验次数
F1/N
s1/cm
F2/N
s2/cm
l2/cm
1
1.0
10.0
0.5
21.3
20.1
2
1.5
20.0
1.0
31.7
29.8
3
2.0
30.0
2.5
25.5
24.0
s和l(支点到力的作用线的距离)这两个量在研究杠杆平衡条件时,哪个量才是有价值的呢?研究小组的同学观察到:支点到F1的作用点的距离(s1)与支点到F1的作用线的距离(l1)是相等的。研究小组的同学又进行了实验。
实验3:
①移动钩码,使杠杆 倾斜或转动 ,并使杠杆处于平衡状态。
②记录F1、s1、l1和F2、s2、l2。
③改变钩码数量,移动钩码,记录杠杆处于平衡时的多组F1、s1、l1和F2、s2、l2。
④分析实验数据,得出弯杠杆的平衡条件。
最后,通过科学思维,得出所有杠杆的平衡条件都是:F1×l1=F2×l2。杠杆的平衡条件可用于解释许多杠杆应用,如用图1方式提升物体比用图2方式省力,就可用杠杆的平衡条件作出合理解释。
请回答:
(1)在研究一侧弯曲的杠杆时,发现的一个新的等量关系是 F1×s1=F2×l2 。
(2)将实验3中的①填写完整。
(3)“支点到力的作用线的距离”在科学上被称为 力臂 。通过探究杠杆平衡条件的实验,使我们深深认识到建立这一科学量的价值。
(4)用图1方式提升物体比用图2方式省力的原因是 图1中动力臂是阻力臂的2倍,图2中动力臂等于阻力臂 。
【解答】解:
(1)根据表格数据知F1×s1=F2×l2;
(2)本实验是研究支点到F1的作用点的距离(s1)与支点到F1的作用线的距离(l1)哪个更有价值,所以应该让着两者不相等,所以应该让杠杆倾斜或转动时,记录杠杆处于平衡时的多组F、s、l的关系;
(3)科学上把支点到到力的作用线的距离称为力臂;
(4)图1中是动滑轮,动力臂是阻力臂的2倍,而图2中是定滑轮,动力臂等于阻力臂,所以图1中的动力臂大于图2中的动力臂,所以用图1方式提升物体比用图2方式省力。
故答案为:F1×s1=F2×l2;
(1)F1×s1=F2×l2;
(2)倾斜或转动;
(3)力臂;
(4)图1中动力臂是阻力臂的2倍,图2中动力臂等于阻力臂。
例7.(2021•丽水)杆秤(如图甲)是我国古老的衡量工具,现今人们仍然在使用。某兴趣小组在老师的指导下,动手制作量程为20克的杆秤(如图乙)。
【制作步骤】
①做秤杆:选取一根筷子,在筷子左端选择两点依次标上“A”、“B”;
②挂秤盘:取一个小纸杯,剪去上部四分之三,系上细绳,固定在秤杆的“A”处;
③系秤纽:在秤杆的“B”处系上绳子;
④标零线:将5克的砝码系上细绳制成秤砣,挂到秤纽的右边,手提秤纽,移动秤砣,使秤杆在水平位置处于平衡状态,在秤砣所挂的位置标上“0”;
⑤定刻度:……
【交流评价】
(1)杆秤是一种测量 物体质量 的工具;
(2)当在秤盘上放置物体称量时,秤砣应从“0”刻度向 右 侧移动;
(3)步骤④标零线的目的是 避免杆秤自身重力对称量的干扰 ;
(4)根据杠杆平衡条件可知,杆秤的刻度是均匀的。定刻度时,小科和小思采用不同的方法,你认为 小思 的方法更合理。
小科:先在秤盘上放1克物体,移动秤砣,使秤杆在水平位置处于平衡状态,在秤砣所挂的位置标上1;然后在秤盘上放2克物体……;按上述方法直到标出所有刻度。
小思:在秤盘上放20克物体,移动秤砣,使秤杆在水平位置处于平衡状态,在秤砣所挂的位置标上20,0和20之间分为20等份,依次标上相应刻度。
【解答】解:(1)杆秤是一种测量物体质量的工具;
(2)当在秤盘上没有放置物体时,秤杆在水平位置平衡后,秤砣所挂的位置为“0”;
当在秤盘上放置物体称量时,由杠杆的平衡条件(m物g•AB=m秤砣g•BO)可知,在秤砣质量和AB不变的情况下,要使秤杆在水平位置平衡,应增大BO的大小,即秤砣应从“0”刻度向右侧移动;
(3)图乙中,B点是支点,当在秤盘上没有放置物体时,秤砣挂在“0”点与杆秤自重平衡,所以步骤④标零线的目的是避免杆秤自身重力对称量的干扰;
(4)根据杠杆平衡条件可知,杆秤的刻度是均匀的,所以定刻度时,小科的方法比较麻烦,而小思的方法比较简单,更合理。
故答案为:(1)物体质量;(2)右;(3)避免杆秤自身重力对称量的干扰;(4)小思。
例8.(2020•杭州)杆秤是一种用来测量物体质量的工具。小金尝试做了如图所示的杆秤。在秤盘上不放重物时,将秤砣移至O点提纽处,杆秤恰好水平平衡,于是小金将此处标为0刻度。当秤盘上放一个质量为2kg的物体时,秤砣移到B处,恰好能使杆秤水平平衡,测得OA=5cm,OB=10cm。
(1)计算秤砣的质量。
(2)小金在B处标的刻度应为 2 kg.若图中OC=2OB,则C处的刻度应为 4 kg。
(3)当秤盘上放一个质量为2kg的物体时,若换用一个质量更大的秤砣,移动秤砣使杆秤再次水平平衡时,其读数 < (选填“<”或“>”)2kg,由此可知一杆杆秤不能随意更换秤砣。
【解答】解:
(1)由题知,秤盘上放一个质量为2kg的物体时,秤砣移到B处,恰好能使杆秤水平平衡,
由杠杆的平衡条件有:m物g×AO=m砣g×OB﹣﹣﹣①,
秤砣的质量:m砣=AOOB×m物=5cm10cm×2kg=1kg;
(2)由题知,秤盘上不放重物时,将秤砣移至O点提纽处,杆秤恰好水平平衡,由此知O处为0刻度,
秤盘上放一个质量为2kg的物体时,秤砣移到B处,恰好能使杆秤水平平衡,所以在B处标的刻度应为2kg;
秤砣在C处时杆秤恰好水平平衡,此时秤盘上放的重物质量为m,
则mg×AO=m砣g×OC,且OC=2OB,
所以mg×AO=m砣g×2OB﹣﹣﹣②
①÷②可得:m=4kg,
所以C处刻度应为4kg。
(3)当秤盘上放一个质量为2kg的物体时,若换用一个质量更大的秤砣,移动秤砣使杆秤再次水平平衡时,由杠杆的平衡条件可知:G物×OA=G砣×l,G物×OA的值不变,G砣增大,力臂l变小,读数变小,故读数小于2kg。
故答案为:(1)秤砣的质量为1kg;
(2)2;4;
(3)<。
例9.(2021•衢州)“认真观察和仔细分析”是科学研究的基本要求。
(1)如图甲,在静止指向南北方向的小磁针上方平行地放一根直导线。闭合开关,原来静止的小磁针发生转动,原来静止的直导线仍然未动。
①小磁针发生转动,可以说明它一定受到力的作用,因为 力是改变物体运动状态的原因 ;
②直导线仍然未动,此时偏转的小磁针对直导线 有 (填“有”或“没有”)力的作用;
(2)如图乙是某饮水器水龙头的结构示意图,A是固定的出水口,B是一根手柄,C是一根连接在阀门上的杆,由弹簧将它拉紧,O1是连接B、C的一根销钉。可将手柄简化为一根杠杆,手柄与A的接触点O2为支点,下压手柄,C就上升,阀门打开水流出;放手后,C自动恢复原位,水龙头关闭。
①请在丙图中画出动力F1的力臂l1;
②正常使用手柄取水时,手柄属于 省力 杠杆。
【解答】解:(1)①小磁针发生转动,小磁针的运动状态发生了变化,是因为受到非平衡力的作用,说明力是改变物体运动状态的原因。
②直导线仍然未动,直导线对小磁针有吸引力,由于物体间力的作用是相互的,偏转的小磁针对直导线也有吸引力的作用;
(2)①延长力的作用线,从支点作动力F1的力的作用线的垂线,支点到垂足的距离为力臂l1;如图所示:
;
②正常使用手柄取水时,动力臂要大于阻力臂,所以为省力杠杆。
故答案为:(1)①力是改变物体运动状态的原因;②有;(2)①如图;②省力。
例10.(2021•宁波)反思是一种良好的学习品质。
(1)一根轻质硬棒AB,在力的作用下能绕固定点O转动。现在硬棒AB上施加两个力F1和F2,O点到F1和F2的作用线的距离分别为d1和d2。小宁认为,只要满足F1×d1=F2×d2,则硬棒AB一定保持静止状态或匀速转动。你认为小宁的想法正确吗?请说出你的理由。
(2)在“动滑轮”实验中,小宁通过如图所示装置进行实验,得到结论:使用动滑轮匀速提升物体,竖直向上的拉力F小于物重G。小宁思考后认为,即使不计摩擦和绳重,上述结论要成立,物重G和动滑轮重G动之间也必须满足一定条件。请你说出这一条件,并予以证明。
【解答】解:(1)F1与F2必须是一个为使杠杆绕支点转动的动力,另一个为阻碍杠杆转动的阻力,然后满足F1L1=F2L2的条件杠杆才平衡,则杠杆一定保持静止状态或匀速转动;硬棒AB上施加两个力F1和F2使杠杆绕支点转动的方向相同,那么即使满足F1×d1=F2×d2,则硬棒AB也不能保持静止状态或匀速转动;
(2)使用动滑轮匀速提升物体时,不计摩擦和绳重,拉力:F=12(G+G滑),
若拉力F<G,即:12(G+G滑)<G,
所以,G>G滑,
即:使用动滑轮匀速提升物体,满足竖直向上的拉力F小于物重G的条件是:物重G大于动滑轮重G动。
答:(1)小宁的想法不正确。若硬棒AB上施加两个力F1和F2使杠杆绕支点转动的方向相同,那么即使满足F1×d1=F2×d2,则硬棒AB也不能保持静止状态或匀速转动;
(2)条件:物重G大于动滑轮重G动。
使用动滑轮匀速提升物体时,不计摩擦和绳重,拉力:F=12(G+G滑),
若拉力F<G,即:12(G+G滑)<G,所以,G>G滑。
【习题巩固】
一.选择题(共12小题)
1.如图所示为我国第一部物理学著作《远西奇器图说》所记载的一机械装置,书中对小球A、B的质量大小关系作出了正确的推测。若小球A的质量为10克,不考虑摩擦和绳重,则两小球匀速移动时,小球B的质量可能为( )
A.14克 B.12克 C.10克 D.8克
【解答】解:不考虑摩擦和绳重,定滑轮即不省力又不省距离,则绳子对A的拉力等于B的重力,当B下降时,B下降的高度hB等于A沿斜面上升的距离LA大于A竖直上升的高度hA,根据功的原理可知,重力对B做的功等于绳子的拉力对A做的功,也等于克服A的重力做的功,即mAghA=mBghB,因为hA<hB,所以mA>mB,因此B的质量肯定小于10g。
故选:D。
2.小明用如图所示的装置探究杠杆的机械效率。他将两个钩码悬挂在B点,在A点用弹簧测力计保持竖直方向向上拉动杠杆,使其绕O点缓慢转动,带动钩码上升一定的高度h(不计摩擦)。下列说法正确的是( )
A.杠杆转动过程中,弹簧测力计的示数会变小
B.仅增加钩码的个数,拉力所做的额外功增大
C.仅将钩码的悬挂点从B点移到C点,拉力做的总功变大
D.仅将拉力的作用点从A点移到C点,杠杆的机械效率不变
【解答】解:A、若弹簧测力计拉力方向一直竖直向上拉动,阻力不变,动力臂减小,阻力臂变小,如下图所示:
△OBB′∽△OAA′,所以OB'OA'=OBOA,所以动力臂与阻力臂的比值不变,因为阻力不变,根据杠杆的平衡条件知,弹簧测力计的示数应该不变,故A错误;
B、克服杠杆重力做的功为额外功,仅增加钩码的个数,杠杆重力和杠杆上升的高度不变,拉力所做的额外功不变,故B错误;
C、仅将钩码的悬挂点从B点移到C点,钩码和杠杆还是上升原来的高度,有用功不变;
钩码由B到C,上升高度不变,根据数学关系可知,杠杆提升的高度减小,额外功减小,又因为总功等于额外功与有用功之和,所以拉力做的总功变小,故C错误;
D、仅将拉力的作用点从A点移到C点,钩码和杠杆还是上升原来的高度,则有用功不变,额外功也不变,总功不变,根据η=W有W总可知,效率不变,故D正确。
故选:D。
3.如图甲所示的力学装置,杠杆OAB始终在水平位置保持平衡,O为杠杆的支点,OB=3OA,竖直细杆a的上端通过力传感器相连在天花板上,下端连接杠杆的A点,竖直细杆b的两端分别与杠杆的B点和物体M固定,水箱的质量为0.8kg,底面积为200cm2,不计杠杆、细杆及连接处的重力,力传感器可以显示出细杆a的上端受到作用力的大小,图乙是力传感器的示数大小随水箱中水的质量变化的图像,则( )
A.物体M的密度为0.2×103kg/m3
B.当传感器示数为0N时,加水质量为1.4kg
C.当加水质量为1.8kg时,容器对桌面的压强为1900Pa
D.加水质量为2kg时,水对水箱底部的压力为31N
【解答】解:
AB.由图乙可知,水箱中没有水时(m=0),力传感器的示数为F0=6N(即细杆a的上端受到的拉力为6N),
由杠杆的平衡条件可得F0×OA=GM×OB,则GM=OAOBF0=13×6N=2N;
设M的底面积为S,压力传感器示数为0时M浸入水中的深度为h1,M的高度为h,
当压力传感器的压力为零时,M受到的浮力等于M的重力2N,由阿基米德原理可得ρ水gSh1=2N﹣﹣﹣①
由图乙可知,当M完全浸没时,压力传感器的示数为24N,
由杠杆的平衡条件可得FA×OA=FB×OB,则FB=OAOBFA=13×24N=8N,
对M受力分析可知,受到竖直向上的浮力、竖直向下的重力和杆的作用力,
则此时M受到的浮力:F浮=GM+FB=2N+8N=10N;
由F浮=ρ液gV排可得,所以M的体积:
VM=V排=F浮ρ水g=10N1.0×103kg/m3×10N/kg=1×10﹣3m3,
物体M的密度:
ρM=mMVM=0.2kg1×10−3m3=0.2×103kg/m3;
由阿基米德原理可得:ρ水gSh=10N﹣﹣﹣﹣﹣﹣﹣②
由①和②得:h=5h1,
由图乙可知,加水1kg时水面达到M的下表面(此时浮力为0),加水2kg时M刚好浸没(此时浮力为10N),该过程中增加水的质量为1kg,浮力增大了10N,
所以,每加0.1kg水,物体M受到的浮力增加1N,当向水箱中加入质量为1.4kg的水时,受到的浮力为4N,B端受到的力4N﹣2N=2N,此时杠杆处于平衡状态,则传感器受力不为0N,故A正确,B错误;
C.由选项B可知,每加0.1kg水,物体M受到的浮力增加1N,加水1kg时水面达到M的下表面,加水质量为1.8kg时,浮力为8N,
物体M受到细杆b向下的压力:FB′=F浮′﹣GM=8N﹣2N=6N,
水箱对水平面的压力:F=(m水箱+m水+mM)g+FB′=(0.8kg+1.8kg+0.2kg)×10N/kg+6N=34N,
容器对桌面的压强为:p=FS=34N200×10−4m2=1700Pa,故C错误;
D.加水质量为2kg时,M刚好完全浸没,由选项B可知此时M受到的浮力是10N,由阿基米德原理可知排开水的重力是10N,
水对水箱底部的压力:F压=G水+G排=m水g+G排=2kg×10N/kg+10N=30N,故D错误。
故选:A。
4.如图所示为建筑工地上常用的吊装工具,物体M是重5000N的配重,杠杆AB的支点为O,已知长度OA:OB=1:2,滑轮下面挂有建筑材料P,每个滑轮重100N,工人体重为700N,杠杆与绳的自重、滑轮组摩擦均不计。当工人用300N的力竖直向下以1m/s的速度匀速拉动绳子时( )
A.建筑材料P上升的速度为3m/s
B.物体M对地面的压力为5000N
C.工人对地面的压力为400N
D.建筑材料P的重力为600N
【解答】解:
A、物重由2段绳子承担,建筑材料P上升的速度v=12v绳=12×1m/s=0.5m/s,故A错误;
B、定滑轮受向下的重力、3段绳子向下的拉力、杠杆对定滑轮向上的拉力,由力的平衡条件可得:FA′=3F+G定=3×300N+100N=1000N;
杠杆对定滑轮的拉力和定滑轮对杠杆的拉力是一对相互作用力,大小相等,即FA=F′A=1000N;
根据杠杆的平衡条件:FA×OA=FB×OB,且OA:OB=1:2,
所以,FB=FA×OAOB=1000N×OA2OA=500N;
因为物体间力的作用是相互的,所以杠杆对物体M的拉力等于物体M对杠杆的拉力,即FB′=FB=500N;
物体M受竖直向下的重力、竖直向上的支持力、竖直向上的拉力,则物体M受到的支持力为:FM支持=GM﹣FB′=5000N﹣500N=4500N,
因为物体间力的作用是相互的,所以物体M对地面的压力:FM压=FM支持=4500N.故B错误;
C、当工人用300N的力竖直向下拉绳子时,因力的作用是相互的,则绳子对工人会施加竖直向上的拉力,其大小也为300N,
此时人受竖直向下的重力G、竖直向上的拉力F、竖直向上的支持力F支,由力的平衡条件可得:F+F支=G,则F支=G﹣F=700N﹣300N=400N,
因为地面对人的支持力和人对地面的压力是一对相互作用力,大小相等,所以工人对地面的压力:F压=F支=400N,故C正确;
D、由图可知n=2,且滑轮组摩擦均不计,由F=12(G+G动)可得,建筑材料P重;G=2F﹣G动=2×300N﹣100N=500N,故D错误;
故选:C。
5.如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟直杆垂直且作用于OB中点的力F,使直杆由竖直位置慢慢转到水平位置,在这个过程中这个直杆( )
A.始终是省力杠杆
B.始终是费力杠杆
C.先是省力杠杆,后是费力杠杆
D.先是费力杠杆,后是省力杠杆
【解答】解;由图可知动力F的力臂始终保持不变,物体的重力G始终大小不变,在杠杆从竖直位置向水平位置转动的过程中,重力的力臂逐渐增大,在L2<L1之前杠杆是省力杠杆,在L2>L1之后,杠杆变为费力杠杆。
故选:C。
6.如图所示,一根可绕O点转动的均匀硬棒重为G,在棒的一端始终施加水平力F,将棒从图示位置缓慢提起至虚线位置的过程中( )
A.F的力臂变小,F的大小变大
B.F的力臂变大,F的大小变小
C.重力G与它的力臂乘积保持不变
D.重力G与它的力臂乘积变大
【解答】解:在棒的一端始终施加水平力F,将棒从图示位置缓慢提起至虚线位置的过程中,根据力臂的定义可知,F的力臂变大,重力G的力臂减小;根据杠杆的平衡条件FL=GL'可知,重力不变,重力的力臂减小,则重力与重力的力臂的乘积减小,动力臂变大,故动力F减小,故B正确,ACD错误。
故选:B。
7.如图,一块厚度、密度均匀的长方形水泥板放在水平地面上,用一竖直向上的力分别作用于水泥板的长或宽的一侧,欲使其一端拎离地面。下列对此情景的分析中,正确的是( )
A.F甲=F乙,因为动力臂都是阻力臂的2倍
B.F甲>F乙,因为甲方法的动力臂比乙方法的短
C.F甲作用于水泥板时,水泥板可看成是费力杠杆
D.F乙作用于水泥板时,水泥板可看成是费力杠杆
【解答】解:A、两次抬起水泥板时,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以阻力臂都等于动力臂的二分之一,即动力臂都是阻力臂的2倍,故A正确;
B、甲的动力臂短,阻力臂也短,根据杠杆的平衡条件可得:F=GL阻L动=G×12L动L动=12G,F甲不会大于F乙,故B错误;
CD、F甲和F乙作用于水泥板时,动力臂都大于阻力臂都为省力杠杆,故CD错误。
故选:A。
8.如图所示,分别用F1、F2和F3作用在杠杆上(始终竖直的力F1、始终与杠杆垂直的力F2、始终水平的力F3),将杠杆缓慢地由实线位置拉到水平位置时,下列说法正确的是( )
A.这三个力都逐渐变大
B.这三个力都逐渐变小
C.F1、F2逐渐变大、F3大小不变
D.F2、F3逐渐变大、F1大小不变
【解答】解:(1)如图所示:
根据图示可知,杠杆原来位置的动力臂为LOA,阻力臂为LOD;杠杆在水平位置时,动力臂为LOC
,阻力臂为LOB;
根据直角三角形中边的关系可知,LOD:LOA=LOC:LOB;
由杠杆平衡的条件可得:F=L2L1G;由于力臂的比值不变,重力不变,因此拉力F1始终不变。
(2)根据杠杆平衡条件F1L1=F2L2分析,将当用始终垂直杠杆的力F1将物体提升至水平位置的过程中,动力臂不变,阻力不变,阻力力臂变大,所以动力F2变大;
(3)将杠杆缓慢地由位置A拉到位置B,阻力G的力臂变大,而阻力不变;
力F作用在杠杆一端且始终是水平方向,即方向不变,所以动力臂变小,
根据杠杆平衡条件F1L1=F2L2分析得出动力F3变大。
故选:D。
9.如图所示,利用轻质滑轮组匀速拉动水平地面上重为300N的物体,拉力F的大小为30N,若物体和地面之间的摩擦力大小为45N,则A处的拉力大小和滑轮组的机械效率分别为( )
A.45N、50% B.45N、75% C.60N、50% D.60N、75%
【解答】解:
(1)物体在水平地面上做匀速运动,则此时A处绳子的拉力与物体与地面之间的摩擦力是一对平衡力,
∵物体和地面之间摩擦力为f=45N,
∴A处的拉力大小为FA=f=45N。
(2)从图可知,由2段绳子与动滑轮相连,则s=2s物,
∵F=30N,f=45N,
∴滑轮组的机械效率为:η=W有用W总=fs物FS=fs物F×2×s物=f2Fη=45N2×30N=75%。
故选:B。
10.如图所示,甲、乙、丙三个小和尚抬着一根长木头向寺庙走去,甲和尚抬着较粗的一端,乙和尚抬着木头的中间部位,丙和尚抬着较细的一端。则下列判断正确的是( )
A.当丙由于肩膀酸痛而撤掉作用力后,甲的负担顿时变轻,乙的负担顿时加重
B.当乙由于肩膀酸痛而撤掉作用力后,甲的负担顿时变重,丙的负担顿时变轻
C.当乙的作用力减小时,甲、丙两人的作用力均增加,但△F甲>△F丙
D.当甲的作用力增加时,乙、丙两人的作用力均减小,但|△F乙|<|△F丙|
【解答】解:
A、当丙由于肩膀酸痛而撤掉作用力后,如下图,
若以A为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F丙去掉,要增大F乙,乙的负担顿时加重;
若以B为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F丙去掉,减小F甲,甲的负担顿时变轻;故A正确;
B、当乙由于肩膀酸痛而撤掉作用力后,如下图,
若以A为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F乙去掉,要增大F丙,丙的负担顿时加重;
若以C为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F乙去掉,甲的负担顿时变重;故B错;
C、当乙的作用力减小时,如下图,
若以A为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,减小的力和力臂乘积相等,F丙的力臂等于F乙的力臂的2倍,所以△F丙=12△F乙;
若以C为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,减小的力和力臂乘积相等,F甲的力臂等于F乙的力臂的2倍,所以△F甲=12△F乙;所以△F甲=△F丙,故C错误;
D、当甲作用力增加时,如下图,
若以B为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F甲增大,F丙也增大,△F甲=△F丙;
若以C为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F甲增大,F乙减小,F甲的力臂等于F乙的力臂的2倍,所以△F甲=12△F乙;|△F乙|>|△F丙|;故D错。
故选:A。
11.如图所示,在“研究杠杆的平衡条件”的实验中,若实验时在杠杆的左端悬挂一个物体,右端用弹簧秤拉着,使杠杆在水平位置保持平衡,今握着弹簧秤缓慢地沿图中虚线的位置1移动到2(杠杆始终在水平位置保持平衡),则弹簧秤的示数( )
A.不断增大 B.先增大,后减小
C.不断减小 D.先减小,后增大
【解答】解:1、2位置施力的力臂如图所示,当施加的动力垂直于杠杆时,动力臂最长,
∵杠杆始终在水平位置保持平衡,阻力和阻力臂一定,
∴此时的动力最小,
∴从位置1移动到2的过程中,动力F先减小再增大。
故选:D。
12.2020年1月14日,宁波三官堂大桥最后一节超大节段钢结构焊接完成,标志着大桥实现合龙。合龙段焊接缝的精度要求为1cm,而结构长度受温度的影响很大,每变化1.5℃就会影响合龙段间隙1cm,所以必须要等到结构预制时计算的气温才可以精准合龙。为了等待最佳的“天时”,施工人员守候了整整3天。如图是当时的场景照片,结合所学知识,判断下列说法不正确的是( )
A.气温是描述天气状况的因素之一
B.拉住锻钢的滑轮组起到了省力杠杆的作用
C.钢段向上运动时,滑轮组的机械效率不断提高
D.锻钢离开船体后,船底部受到的液体压强比锻钢离开前小
【解答】解:
A.气温是描述天气状况的因素之一,故A正确;
B.拉住锻钢的滑轮组能省力,起到了省力杠杆的作用,故B正确;
C.钢段向上运动时,由于动滑轮和物体重力保持不变,根据公式η=W有用W总=GℎGℎ+G动ℎ=GG+G动可知,滑轮组的机械效率保持不变,故C错误;
D.锻钢离开船体后,船体的重力减小,根据F浮=G可知,船体受到的浮力减小;根据阿基米德原理F浮=ρ水gV排可知,船体排开水的体积变小,那么船底到水面的深度减小;根据公式p=ρgh可知,船底部受到的液体压强比锻钢离开前小,故D正确。
故选:C。
二.填空题(共3小题)
13.图甲是一种市场上使用率较高的易拉罐内嵌式拉环,图乙是简化后的模型。O点是铆接点,拉动拉环A点时会绕O点转动。AB长为2.4cm,OB为0.6cm。如图所示,作用在B点的力达到15N时,可以将封口顶开。
(1)拉开拉环所需最小的力F是 5 牛。
(2)若拉环与手指的接触面积为40mm2,则作用在手指上的压强为 1.25×105 帕。
【解答】解:(1)根据题意可知,阻力臂为OB=0.6cm,阻力F′=15N,
当在A点拉动拉环时,动力臂最长,力最小,此时动力臂为OA=AB﹣OB=2.4cm﹣0.6cm=1.8cm,
根据杠杆平衡条件F1L1=F2L2可得,拉开拉环所需最小的力:F=F'L'L=15N×0.6cm1.8cm=5N;
(2)根据力的作用的相互性可知,作用在手指上的压力等于拉开拉环所需最小的力,即F压=F=5N,
受力面积S=40mm2=40×10﹣6m2,
则作用在手指上的压强:p=F压S=5N40×10−6m2=1.25×105Pa。
故答案为:(1)5;(2)1.25×105。
14.小明家有个木衣架,他将书包挂在衣架的A处,衣架倒了下来。他分析了衣架倒下来的原因,并测量了以下的数据:木衣架质量3kg;圆底盘直径30cm;其他数据如图所示,衣架受到重力的作用线经过圆底盘的圆心。分析木衣架会倒的原因时,可以把它看成 杠杆 。通过分析,小明认为防止衣架倒下来可以采取以下措施:控制所挂书包的质量不允许超过 4.5 kg,或者适当 增大 圆底盘直径。
【解答】解:(1)分析木衣架会倒的原因时,可以把它看成杠杆;
木衣架的重力:G2=m2g=3kg×10N/kg=30N;
圆盘的半径为30cm2=15cm,由图知,以底盘右侧点为支点,
书包对衣架力和力臂的乘积=F1L1=F1×(25cm﹣15cm);
衣架自身重力和力臂的乘积=F2L2=30N×15cm;
根据F1L1=F2L2,可得F1×(25cm﹣15cm)=30N×15cm;
解得F1=45N,
则书包的质量m=G1g=F1g=45N10N/kg'=4.5kg;
(2)由题意知,衣架倾倒的原因是两边力和力臂的乘积不相等造成的,所以要防止其倾倒,可减小挂物与其力臂的乘积或增大自重与其力臂的乘积,故可减小挂衣钩的长度、或增大底盘的直径、或圆盘底座换用大理石等密度更大的材料、或在挂衣钩的对侧挂物品等。
故答案为:杠杆;4.5;增大。
15.如图所示,置于水平桌面上的物体A重490N,物体B重294N,物体B在匀速下降了40cm的过程中,拉动物体A在水平桌面上匀速移动了一段距离;若用一水平向左的力F拉动物体A,使物体A在5s内匀速移动0.5m(不计动滑轮、绳重以及滑轮轮轴间摩擦),则拉力F为 294 N,绳子拉力对物体B所做的功为 73.5 J,物体A与桌面的滑动摩擦力为 147 N。
【解答】解:(1)由图知,承担物重的绳子股数是2,绳子自由端的拉力:F′=GB2=294N2=147N。
物体A匀速运动,拉力和摩擦力是一对平衡力,物体A所受摩擦力:f=F′=147N。
(2)用一水平向左的力F拉动物体A,拉力:F=f+F′=147N+147N=294N;
(3)绳子拉力对物体B所做的功:W=GBh=GB×s2=294N×0.5m2=73.5J。
故答案为:294;73.5;147。
三.计算题(共3小题)
16.如图所示是一种起重机的示意图。起重机重2.4×104N(包括悬臂),重心为P1,为使起重机起吊重物时不致倾倒,在其右侧配有重M(重心为P2)。现测得AB为10m,BO为1m,BC为4m,CD为1.5m。
(1)若该起重机将重物吊升6m,用时50s,则重物上升的平均速度是多少?
(2)现在水平地面上有重为2.44×104N的货箱,若要吊起此货箱,起重机至少需加重量为多少的配重?
(3)该起重机最大配重量是多少?
【解答】解:(1)重物上升的平均速度:v=st=6m50s=0.12m/s;
(2)若要吊起此货箱,起重机对货箱的拉力:F拉′=G=2.44×104N,
支点为B,配重的力臂:BD=BC+CD=4m+1.5m=5.5m,
根据杠杆平衡条件可得:F拉′×AB=G起重机×BO+G配重×BD,
即:2.44×104N×10m=2.4×104N×1m+G配重×5.5m,
解得:G配重=4×104N;
(3)不起吊物体时,支点为C,
起重机自重的力臂:OC=BC﹣BO=4m﹣1m=3m;配重的力臂:CD=1.5m。
根据杠杆平衡条件可得:G起重机×OC=G配重′×CD,
即:2.4×104N×3m=G配重′×1.5m,
解得最大配重:G配重′=4.8×104N。
答:(1)重物上升的平均速度是0.12m/s;
(2)起重机至少需加重量为4×104N的配重;
(3)该起重机最大配重量是4.8×104N。
17.如图所示,花岗岩石块甲、乙体积之比为12:3,将它们分别挂在轻质硬棒AB的两端,当把石块甲浸没在水中时,硬棒恰能水平位置平衡。然后将甲石块从水中取出,拭干后浸没在液体丙中,调节石块乙的位置到C处时,硬棒在水平位置再次平衡,且OC=2OA.(已知花岗岩的密度ρ=2.6×103kg/m3),求:
(1)AO:OB;
(2)液体丙的密度。
【解答】解:(1)设甲的体积为12V,乙的体积为3V.当把石块甲浸没在水中时,硬棒恰能水平位置平衡。
则根据杠杆的平衡条件:
(G甲﹣F浮)•AO=G乙•OB
即:(ρg12V﹣ρ水g12V)•AO=ρg3V•OB
代入数据得(2.6×103kg/m3×g×12V﹣1.0×103kg/m3×g×12V)×OA=2.6×103kg/m3×g×3V×OB ①
由①得AO:OB=13:32;
(2)将甲浸没在液体丙中,硬棒在水平位置再次平衡,
则根据杠杆的平衡条件得:
(ρg12V﹣ρ液g12V)•AO=ρg3V•OC
代入数据得(2.6×103kg/m3×g×12V﹣ρ液×g×12V)×OA=2.6×103kg/m3×g×3V×OC ②
根据已知条件得:OC=2OA ③
由②③得,液体丙的密度为ρ液=1.3×103kg/m3
答:(1)AO:OB=13:32;
(2)液体丙的密度是1.3×103kg/m3。
18.如图所示,斜面长s=1.5m,高h=0.3m。建筑工人将重G=480N的货物箱,用绳子从地面匀速拉到顶端时,沿斜面向上的拉力F=150N,忽略绳子重力。求:
(1)该过程拉力F做的功;
(2)该装置的机械效率;
(3)货物箱在斜面上受的摩擦力大小。
【解答】解:(1)该过程拉力F做的功:
W总=Fs=150N×1.5m=225J;
(2)有用功:
W有=Gh=480N×0.3m=144J,
该装置的机械效率:
η=W有用W总×100%=144J225J×100%=64%;
(3)额外功:
W额=W总﹣W有=225J﹣144J=81J,
由W额=fs可得,货物箱在斜面上受的摩擦力大小:
f=W额s=81J1.5m=54N。
答(1)拉力做的功为225J;
(2)斜面的机械效率为64%;
(3)物体受到的摩擦力为54N。
四.综合能力题(共2小题)
19.如图所示为测液体密度的密度秤示意图,轻质杆AB长为40cm,可绕O点转动(轻质杆与O点之间的摩擦忽略不计),其左端A点挂一个质量为0.2kg,容积为200mL的桶,AO=10cm;在O点的右侧用轻质细绳悬挂一个质量为0.2kg的秤砣,秤砣可沿OB左右滑动。使用时,在桶中装满待测液体,移动秤砣使密度秤再次水平平衡,读出相应位置的刻度值即可。
(1)密度秤零刻度在O点右侧 10 cm处。
(2)该密度秤所能测量的最大密度是多少?
(3)判断该密度秤的刻度是否均匀(通过推导说明)。
【解答】解:(1)当小桶为空桶时移动秤砣至某点,设该点为E,此时密度秤正好水平平衡,
小桶的质量为0.2kg,秤砣的质量为 0.2kg,左侧的力臂为AO=10cm,
则杠杆平衡条件F1L1=F2L2得:G桶OA=G砣OE,
即:m桶gOA=m砣gOE,
所以,OE=m桶OAm砣=0.2kg×10cm0.2kg=10cm,即密度秤零刻度在O点右侧10cm处;
(2)0.4m=40cm;
当右侧的力臂为OB=AB﹣OA=40cm﹣10cm=30cm时,该密度秤小桶所能测量液体的质量最大,则密度就最大,
根据杠杆平衡条件F1L1=F2L2得,
(G桶+G液体)OA=G砣OB,
即:(m桶+m液)gOA=m砣gOB﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣,
则:液体的质量m液=OBOAm砣﹣m桶=30cm10cm×0.2kg﹣0.2kg=0.4kg=400g,
所以,液体的最大密度:ρ液最大=mV=400g200cm3=2g/cm3=2×103kg/m3。
(3)液体的密度:ρ液=m液V=L砣OAm砣−m桶V=L砣OA⋅Vm砣−m桶V;由此可知:液体密度与提钮到秤舵的距离之间的关系是一次函数,因此密度秤的刻度是均匀的。
故答案为:(1)10;(2)液体的最大密度是2×103kg/m3;(3)液体的密度:ρ液=m液V=L砣OAm砣−m桶V=L砣OA⋅Vm砣−m桶V;由此可知:液体密度与提钮到秤舵的距离之间的关系是一次函数,因此密度秤的刻度是均匀的。
20.如图所示,小金想利用滑轮组用最省力的绳子绕法水平匀速拉动物体A.若地面对A的摩擦力与A的重力的比值为n,A的比热为c,A的温度上升t。(为计算方便,假设摩擦产生的热都被A吸收)
(1)在答题卷的图中画出滑轮组上绳子的绕法。
(2)在用绳子水平匀速拉动物体A的过程中,若不计绳子与滑轮之间的摩擦和自重,拉力做的功 等于 物体A克服摩擦做的功(选填大于,小于或等于)
(3)已知物体受到的滑动摩擦力和物体间相对滑动的距离的乘积,在数值上等于滑动过程产生的内能,试推导绳子末端移动的距离s= 3ctng (请写出推导过程,所得结果用字母表示)
【解答】解:(1)由图可知,该滑轮组由一个动滑轮和一个定滑轮组成,当连接动滑轮绳子的段数最多为3段时,此时最省力,如图所示:
;
(2)不计绳子与滑轮之间的摩擦和自重,则拉力所做的功全部用在物体A上,即拉力做的功等于物体A克服摩擦做的功;
(3)由题意可得fG=n,则地面对A的摩擦力f=nG,
设物体移动的距离为s′,则克服摩擦做功,转化为内能的大小为:W=fs′=nGs′=nmgs′;
物体A吸收的热量:Q=cmt,
由题知,摩擦产生的热都被A吸收,则nmgs′=cmt,
解得:s′=ctng,
连接动滑轮绳子的段数为3段,绳子移动的距离为物体移动距离的三倍,
则绳子末端移动的距离s=3ctng。
故答案为:(1)如上图;(2)等于;(3)3ctng。
专题19 简单机械
【思维导图】
【知识点回顾】
一、杠杆
考点1 指认杠杆的支点、动力、阻力、动力臂和阻力臂
1.杠杆的定义:在力的作用下,能绕固定点转动的硬棒叫做杠杆。杠杆可以是直的、也可以是弯的。
2.杠杆的五要素:________、动力、阻力、动力臂、阻力臂。
3.动力和阻力的方向不一定相反,但作用效果一定相反。
1.力臂是________的距离,而不是支点到力的作用点的距离。
2.作力臂的步骤
a.找出支点O的位置;
b.画出动力作用线和阻力作用线;
c.从支点分别作动力作用线和阻力作用线的垂线段即为________和________。
1.杠杆保持________或________状态,称为杠杆平衡。
2.杠杆平衡的条件
动力×动力臂=阻力×阻力臂,即________。
杠杆类型
力臂关系
平衡时力的关系
优缺点
应用
省力杠杆
l1>l2
________
省力,费距离
撬棒、瓶盖起子等
费力杠杆
l1
________,省距离
镊子、火钳等
等臂杠杆
l1=l2
F1=F2
不省力,不省距离
天平、定滑轮等
1.人的头颅——等臂杠杆
抬头时,可以在颈部找到杠杆,杠杆的支点在脊柱之顶,支点后的肌肉收缩提供动力,头颅的重量是阻力。这个杠杆几乎是个________杠杆。
2.人的手臂——费力杠杆
肘关节是支点,肱二头肌肉所用的力是________力,手拿的重物的重力是________力,显然我们的前臂是一种________力杠杆。虽然费力,但是可以省距离(少移动距离),提高工作效率。
3.走路时的脚——省力杠杆
脚掌前部是支点,人体的重力就是________力,腿肚肌肉产生的拉力就是________力。这种杠杆可以克服较大的体重。
二、滑轮
1.定滑轮:工作时轴固定不动的滑轮,如图甲。
2.动滑轮:工作时轴发生移动的滑轮,如图乙。
实质
力的关系
(F,G)
距离的关系
(s,h)
作用
定滑轮
等臂杠杆
F=G
s=h
改变力的方向
动滑轮
动力臂是阻力臂两倍的杠杆
F=G
s=________
省力
滑轮组
F=
________
s=nh
既可以省力,也可以改变力的方向
1.滑轮组:由定滑轮跟动滑轮组成的滑轮组。
2.特点:既能改变用力的________,也能________。
考点9 使用滑轮组(限于两个滑轮的滑轮组)解决简单的问题
使用滑轮组时,滑轮组用n段绳子拉物体,拉物体所用的力F就是物重的n分之一,即F=________,n表示拉物体绳子数。
考点1 2.支点
考点2 1.支点到力的作用线 2.动力臂 阻力臂
考点3 1.静止 匀速转动 2.F1l1=F2l2
考点4 F1
考点7 2h G
考点8 2.方向 省力
考点9 G/n
【例题精析】
例1.(2021•温州)停放自行车时,若要从如图四点中选择一点施加竖直向上的力,将后轮略微提起。其中最省力的点是( )
A.A点 B.B点 C.C点 D.D点
【解答】解:根据杠杆平衡的条件,F1×L1=F2×L2,在杠杆中的阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长.若要从如图四点中选择一点施加竖直向上的力,将后轮略微提起,是围绕前轮与地面的接触点转动,分别作出在A、B、C、D四点施加竖直向上的力并延长,再支点作出垂线,即力臂,如图所示:
由图可知最省力的点是D。
故选:D。
例2.(2021•金华)生活中处处有科学。下列日常工具在使用时属于费力杠杆的是( )
A.独轮车 B.开瓶器
C.钓鱼竿 D.大铡刀
【解答】解:A、独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不合题意;
B、开瓶器在使用过程中,动力臂大于阻力臂,是省力杠杆,故B不合题意;
C、钓鱼竿在使用时,动力臂小于阻力臂,是费力杠杆,故C符合题意;
D、大铡刀在使用过程中,动力臂大于阻力臂,是省力杠杆,故D不合题意。
故选:C。
例3.(2020•宁波)现有一根形变不计、长为L的铁条AB和两根横截面积相同、长度分别为La、Lb的铝条a、b,将铝条a叠在铁条AB上,并使它们的右端对齐,然后把它们放置在三角形支架O上,AB水平平衡,此时OB的距离恰好为La,如图所示。取下铝条a后,将铝条b按上述操作方法使铁条AB再次水平平衡,此时OB的距离为Lx.下列判断正确的是( )
A.若La<Lb<L,则La<Lx<La+Lb2成立
B.若La<Lb<L,则Lx>La+Lb2成立
C.若Lb<La,La+Lb2<Lx<La成立
D.若Lb<La,则Lx<La+Lb2成立
【解答】解:由题意可知,将铝条a叠在铁条AB上,并使它们的右端对齐,然后把它们放置在三角形支架O上,AB水平平衡,此时OB的距离恰好为La,
(1)如下图所示,若La<Lb<L,用铝条b替换铝条a就相当于在铝条a左侧放了一段长为Lb﹣La、重为Gb﹣Ga的铝条,
这一段铝条的重心距B端的长度为La+Lb−La2=La+Lb2,
而铁条AB和铝条a组成的整体的重心在支架原来的位置,距B端的长度为La,
要使铁条AB水平平衡,由杠杆的平衡条件F1L1=F2L2可知,支架O应移到上述两个重心之间,
即La<Lx<La+Lb2,故A正确、B错误;
(2)如下图所示,若Lb<La,用铝条b替换铝条a就相当于从铝条a左侧截掉一段长为La﹣Lb、重为Ga﹣Gb的铝条,
也相当于距B端Lb+La−Lb2=La+Lb2处施加一个竖直向上的力,其大小等于Ga﹣Gb,
由杠杆的平衡条件F1L1=F2L2可知,要使铁条AB水平平衡,支架O应向A端移动,则Lx>La,故C错误;
由Lb<La可知,Lx>La=La+La2>La+Lb2,故D错误。
故选:A。
例4.(2019•绍兴)如图是上肢力量健身器示意图,杠杆AB可绕O点在竖直平面内转动,AB=3BO,配重的重力为120牛,重力为500牛的健身者通过细绳在B点施加竖直向下的拉力为F1时,杠杆在水平位置平衡,配重对地面的压力为85牛,在B点施加竖直向下的拉力为F2时,杠杆仍在水平位置平衡,配重对地面的压力为60牛。已知F1:F2=2:3,杠杆AB和细绳的质量及所有摩擦均忽略不计,下列说法正确的是( )
A.配重对地面的压力为50牛时,健身者在B点施加竖直向下的拉力为160牛
B.配重对地面的压力为90牛时,健身者在B点施加竖直向下的拉力为120牛
C.健身者在B点施加400牛竖直向下的拉力时,配重对地面的压力为35牛
D.配重刚好被匀速拉起时,健身者在B点施加竖直向下的拉力为540牛
【解答】解:
当配重在地面上保持静止状态时,它受到的绳子的拉力F为:F=G﹣FN;
因为动滑轮上有2段绳子承担物重,
因此杠杆A点受到的拉力:FA=2F+G动=2×(G﹣FN)+G动;
根据杠杆的平衡条件得到:FA×OA=FB×OB;
即【2×(G﹣FN)+G动】×OA=FB×OB,
因为:AB=3BO;
所以:AO=2BO;
那么【2×(G﹣FN)+G动】×2=FB×1,
即FB=4×(G﹣FN)+2G动;
当压力为85N时,F1=4×(120N﹣85N)+2G动;
当压力为60N时,F2=4×(120N﹣60N)+2G动;
因为:F1:F2=2:3;
所以:4×(120N−85N)+2G动4×(120N−60N)+2G动=23;
解得:G动=30N;
A.当配重对地面的压力为50N时,B点向下的拉力为:
FB=4×(G﹣FN)+2G动=FB=4×(120N﹣50N)+2×30N=340N,故A错误;
B.当配重对地面的压力为90N时,B点向下的拉力为:
FB=4×(G﹣FN)+2G动=FB=4×(120N﹣90N)+2×30N=180N,故B错误;
C.健身者在B点施加400N竖直向下的拉力时,
根据FB=4×(G﹣FN)+2G动得到:
400N=4×(120N﹣FN)+2×30N;
解得:FN=35N,故C正确;
D.配重刚好被拉起,即它对地面的压力为0,
根据FB=4×(G﹣FN)+2G动得到:
FB=4×(120N﹣0N)+2×30N=540N>500N;
因为人的最大拉力等于体重500N,因此配重不可能匀速拉起,故D错误。
故选:C。
例5.(2020•金华)简单机械广泛应用于日常生活。某小区物业为了方便住户扔垃圾,对垃圾桶进行了简易改装(如图甲)。被拉起的垃圾桶盖可看成是一个简易杠杆。图乙为桶盖与绳子成90°角且处于静止状态时的示意图,O为杠杆支点,A为绳子拉力F的作用点,B为桶盖的重心。
根据图乙回答下列问题:
(1)定滑轮的作用是 改变力的方向 ;
(2)该状态下的桶盖属于 省力 (填“省力”、“费力”或“等臂”)杠杆。
【解答】解:(1)定滑轮的作用是可以改变力的方向;
(2)由图可知,垃圾桶盖使用过程中,动力臂大于阻力臂,属于省力杠杆。
故答案为:(1)改变力的方向;(2)省力。
例6.(2021•湖州)下列是某科学研究小组探究杠杆平衡条件的实验过程:(本实验均使用轻质杠杆)
实验1:在直杠杆水平平衡时(如图甲所示)进行实验,记录多组数据。得出:F1×s1=F2×s2(注:s1和s2分别表示支点O到F1和F2的作用点的距离)。在直杠杆倾斜平衡时(如图乙所示)进行实验,也得到了同样的结论。
该结论适用于所有平衡时的杠杆吗?
实验2:科学研究小组用一侧弯曲的杠杆进行如图丙所示的实验,移动钩码,改变钩码数量,记录数据如表,分析表格数据发现上述结论并不成立,但发现一个新的等量关系,即: F1×s1=F2×l2 。
实验次数
F1/N
s1/cm
F2/N
s2/cm
l2/cm
1
1.0
10.0
0.5
21.3
20.1
2
1.5
20.0
1.0
31.7
29.8
3
2.0
30.0
2.5
25.5
24.0
s和l(支点到力的作用线的距离)这两个量在研究杠杆平衡条件时,哪个量才是有价值的呢?研究小组的同学观察到:支点到F1的作用点的距离(s1)与支点到F1的作用线的距离(l1)是相等的。研究小组的同学又进行了实验。
实验3:
①移动钩码,使杠杆 倾斜或转动 ,并使杠杆处于平衡状态。
②记录F1、s1、l1和F2、s2、l2。
③改变钩码数量,移动钩码,记录杠杆处于平衡时的多组F1、s1、l1和F2、s2、l2。
④分析实验数据,得出弯杠杆的平衡条件。
最后,通过科学思维,得出所有杠杆的平衡条件都是:F1×l1=F2×l2。杠杆的平衡条件可用于解释许多杠杆应用,如用图1方式提升物体比用图2方式省力,就可用杠杆的平衡条件作出合理解释。
请回答:
(1)在研究一侧弯曲的杠杆时,发现的一个新的等量关系是 F1×s1=F2×l2 。
(2)将实验3中的①填写完整。
(3)“支点到力的作用线的距离”在科学上被称为 力臂 。通过探究杠杆平衡条件的实验,使我们深深认识到建立这一科学量的价值。
(4)用图1方式提升物体比用图2方式省力的原因是 图1中动力臂是阻力臂的2倍,图2中动力臂等于阻力臂 。
【解答】解:
(1)根据表格数据知F1×s1=F2×l2;
(2)本实验是研究支点到F1的作用点的距离(s1)与支点到F1的作用线的距离(l1)哪个更有价值,所以应该让着两者不相等,所以应该让杠杆倾斜或转动时,记录杠杆处于平衡时的多组F、s、l的关系;
(3)科学上把支点到到力的作用线的距离称为力臂;
(4)图1中是动滑轮,动力臂是阻力臂的2倍,而图2中是定滑轮,动力臂等于阻力臂,所以图1中的动力臂大于图2中的动力臂,所以用图1方式提升物体比用图2方式省力。
故答案为:F1×s1=F2×l2;
(1)F1×s1=F2×l2;
(2)倾斜或转动;
(3)力臂;
(4)图1中动力臂是阻力臂的2倍,图2中动力臂等于阻力臂。
例7.(2021•丽水)杆秤(如图甲)是我国古老的衡量工具,现今人们仍然在使用。某兴趣小组在老师的指导下,动手制作量程为20克的杆秤(如图乙)。
【制作步骤】
①做秤杆:选取一根筷子,在筷子左端选择两点依次标上“A”、“B”;
②挂秤盘:取一个小纸杯,剪去上部四分之三,系上细绳,固定在秤杆的“A”处;
③系秤纽:在秤杆的“B”处系上绳子;
④标零线:将5克的砝码系上细绳制成秤砣,挂到秤纽的右边,手提秤纽,移动秤砣,使秤杆在水平位置处于平衡状态,在秤砣所挂的位置标上“0”;
⑤定刻度:……
【交流评价】
(1)杆秤是一种测量 物体质量 的工具;
(2)当在秤盘上放置物体称量时,秤砣应从“0”刻度向 右 侧移动;
(3)步骤④标零线的目的是 避免杆秤自身重力对称量的干扰 ;
(4)根据杠杆平衡条件可知,杆秤的刻度是均匀的。定刻度时,小科和小思采用不同的方法,你认为 小思 的方法更合理。
小科:先在秤盘上放1克物体,移动秤砣,使秤杆在水平位置处于平衡状态,在秤砣所挂的位置标上1;然后在秤盘上放2克物体……;按上述方法直到标出所有刻度。
小思:在秤盘上放20克物体,移动秤砣,使秤杆在水平位置处于平衡状态,在秤砣所挂的位置标上20,0和20之间分为20等份,依次标上相应刻度。
【解答】解:(1)杆秤是一种测量物体质量的工具;
(2)当在秤盘上没有放置物体时,秤杆在水平位置平衡后,秤砣所挂的位置为“0”;
当在秤盘上放置物体称量时,由杠杆的平衡条件(m物g•AB=m秤砣g•BO)可知,在秤砣质量和AB不变的情况下,要使秤杆在水平位置平衡,应增大BO的大小,即秤砣应从“0”刻度向右侧移动;
(3)图乙中,B点是支点,当在秤盘上没有放置物体时,秤砣挂在“0”点与杆秤自重平衡,所以步骤④标零线的目的是避免杆秤自身重力对称量的干扰;
(4)根据杠杆平衡条件可知,杆秤的刻度是均匀的,所以定刻度时,小科的方法比较麻烦,而小思的方法比较简单,更合理。
故答案为:(1)物体质量;(2)右;(3)避免杆秤自身重力对称量的干扰;(4)小思。
例8.(2020•杭州)杆秤是一种用来测量物体质量的工具。小金尝试做了如图所示的杆秤。在秤盘上不放重物时,将秤砣移至O点提纽处,杆秤恰好水平平衡,于是小金将此处标为0刻度。当秤盘上放一个质量为2kg的物体时,秤砣移到B处,恰好能使杆秤水平平衡,测得OA=5cm,OB=10cm。
(1)计算秤砣的质量。
(2)小金在B处标的刻度应为 2 kg.若图中OC=2OB,则C处的刻度应为 4 kg。
(3)当秤盘上放一个质量为2kg的物体时,若换用一个质量更大的秤砣,移动秤砣使杆秤再次水平平衡时,其读数 < (选填“<”或“>”)2kg,由此可知一杆杆秤不能随意更换秤砣。
【解答】解:
(1)由题知,秤盘上放一个质量为2kg的物体时,秤砣移到B处,恰好能使杆秤水平平衡,
由杠杆的平衡条件有:m物g×AO=m砣g×OB﹣﹣﹣①,
秤砣的质量:m砣=AOOB×m物=5cm10cm×2kg=1kg;
(2)由题知,秤盘上不放重物时,将秤砣移至O点提纽处,杆秤恰好水平平衡,由此知O处为0刻度,
秤盘上放一个质量为2kg的物体时,秤砣移到B处,恰好能使杆秤水平平衡,所以在B处标的刻度应为2kg;
秤砣在C处时杆秤恰好水平平衡,此时秤盘上放的重物质量为m,
则mg×AO=m砣g×OC,且OC=2OB,
所以mg×AO=m砣g×2OB﹣﹣﹣②
①÷②可得:m=4kg,
所以C处刻度应为4kg。
(3)当秤盘上放一个质量为2kg的物体时,若换用一个质量更大的秤砣,移动秤砣使杆秤再次水平平衡时,由杠杆的平衡条件可知:G物×OA=G砣×l,G物×OA的值不变,G砣增大,力臂l变小,读数变小,故读数小于2kg。
故答案为:(1)秤砣的质量为1kg;
(2)2;4;
(3)<。
例9.(2021•衢州)“认真观察和仔细分析”是科学研究的基本要求。
(1)如图甲,在静止指向南北方向的小磁针上方平行地放一根直导线。闭合开关,原来静止的小磁针发生转动,原来静止的直导线仍然未动。
①小磁针发生转动,可以说明它一定受到力的作用,因为 力是改变物体运动状态的原因 ;
②直导线仍然未动,此时偏转的小磁针对直导线 有 (填“有”或“没有”)力的作用;
(2)如图乙是某饮水器水龙头的结构示意图,A是固定的出水口,B是一根手柄,C是一根连接在阀门上的杆,由弹簧将它拉紧,O1是连接B、C的一根销钉。可将手柄简化为一根杠杆,手柄与A的接触点O2为支点,下压手柄,C就上升,阀门打开水流出;放手后,C自动恢复原位,水龙头关闭。
①请在丙图中画出动力F1的力臂l1;
②正常使用手柄取水时,手柄属于 省力 杠杆。
【解答】解:(1)①小磁针发生转动,小磁针的运动状态发生了变化,是因为受到非平衡力的作用,说明力是改变物体运动状态的原因。
②直导线仍然未动,直导线对小磁针有吸引力,由于物体间力的作用是相互的,偏转的小磁针对直导线也有吸引力的作用;
(2)①延长力的作用线,从支点作动力F1的力的作用线的垂线,支点到垂足的距离为力臂l1;如图所示:
;
②正常使用手柄取水时,动力臂要大于阻力臂,所以为省力杠杆。
故答案为:(1)①力是改变物体运动状态的原因;②有;(2)①如图;②省力。
例10.(2021•宁波)反思是一种良好的学习品质。
(1)一根轻质硬棒AB,在力的作用下能绕固定点O转动。现在硬棒AB上施加两个力F1和F2,O点到F1和F2的作用线的距离分别为d1和d2。小宁认为,只要满足F1×d1=F2×d2,则硬棒AB一定保持静止状态或匀速转动。你认为小宁的想法正确吗?请说出你的理由。
(2)在“动滑轮”实验中,小宁通过如图所示装置进行实验,得到结论:使用动滑轮匀速提升物体,竖直向上的拉力F小于物重G。小宁思考后认为,即使不计摩擦和绳重,上述结论要成立,物重G和动滑轮重G动之间也必须满足一定条件。请你说出这一条件,并予以证明。
【解答】解:(1)F1与F2必须是一个为使杠杆绕支点转动的动力,另一个为阻碍杠杆转动的阻力,然后满足F1L1=F2L2的条件杠杆才平衡,则杠杆一定保持静止状态或匀速转动;硬棒AB上施加两个力F1和F2使杠杆绕支点转动的方向相同,那么即使满足F1×d1=F2×d2,则硬棒AB也不能保持静止状态或匀速转动;
(2)使用动滑轮匀速提升物体时,不计摩擦和绳重,拉力:F=12(G+G滑),
若拉力F<G,即:12(G+G滑)<G,
所以,G>G滑,
即:使用动滑轮匀速提升物体,满足竖直向上的拉力F小于物重G的条件是:物重G大于动滑轮重G动。
答:(1)小宁的想法不正确。若硬棒AB上施加两个力F1和F2使杠杆绕支点转动的方向相同,那么即使满足F1×d1=F2×d2,则硬棒AB也不能保持静止状态或匀速转动;
(2)条件:物重G大于动滑轮重G动。
使用动滑轮匀速提升物体时,不计摩擦和绳重,拉力:F=12(G+G滑),
若拉力F<G,即:12(G+G滑)<G,所以,G>G滑。
【习题巩固】
一.选择题(共12小题)
1.如图所示为我国第一部物理学著作《远西奇器图说》所记载的一机械装置,书中对小球A、B的质量大小关系作出了正确的推测。若小球A的质量为10克,不考虑摩擦和绳重,则两小球匀速移动时,小球B的质量可能为( )
A.14克 B.12克 C.10克 D.8克
【解答】解:不考虑摩擦和绳重,定滑轮即不省力又不省距离,则绳子对A的拉力等于B的重力,当B下降时,B下降的高度hB等于A沿斜面上升的距离LA大于A竖直上升的高度hA,根据功的原理可知,重力对B做的功等于绳子的拉力对A做的功,也等于克服A的重力做的功,即mAghA=mBghB,因为hA<hB,所以mA>mB,因此B的质量肯定小于10g。
故选:D。
2.小明用如图所示的装置探究杠杆的机械效率。他将两个钩码悬挂在B点,在A点用弹簧测力计保持竖直方向向上拉动杠杆,使其绕O点缓慢转动,带动钩码上升一定的高度h(不计摩擦)。下列说法正确的是( )
A.杠杆转动过程中,弹簧测力计的示数会变小
B.仅增加钩码的个数,拉力所做的额外功增大
C.仅将钩码的悬挂点从B点移到C点,拉力做的总功变大
D.仅将拉力的作用点从A点移到C点,杠杆的机械效率不变
【解答】解:A、若弹簧测力计拉力方向一直竖直向上拉动,阻力不变,动力臂减小,阻力臂变小,如下图所示:
△OBB′∽△OAA′,所以OB'OA'=OBOA,所以动力臂与阻力臂的比值不变,因为阻力不变,根据杠杆的平衡条件知,弹簧测力计的示数应该不变,故A错误;
B、克服杠杆重力做的功为额外功,仅增加钩码的个数,杠杆重力和杠杆上升的高度不变,拉力所做的额外功不变,故B错误;
C、仅将钩码的悬挂点从B点移到C点,钩码和杠杆还是上升原来的高度,有用功不变;
钩码由B到C,上升高度不变,根据数学关系可知,杠杆提升的高度减小,额外功减小,又因为总功等于额外功与有用功之和,所以拉力做的总功变小,故C错误;
D、仅将拉力的作用点从A点移到C点,钩码和杠杆还是上升原来的高度,则有用功不变,额外功也不变,总功不变,根据η=W有W总可知,效率不变,故D正确。
故选:D。
3.如图甲所示的力学装置,杠杆OAB始终在水平位置保持平衡,O为杠杆的支点,OB=3OA,竖直细杆a的上端通过力传感器相连在天花板上,下端连接杠杆的A点,竖直细杆b的两端分别与杠杆的B点和物体M固定,水箱的质量为0.8kg,底面积为200cm2,不计杠杆、细杆及连接处的重力,力传感器可以显示出细杆a的上端受到作用力的大小,图乙是力传感器的示数大小随水箱中水的质量变化的图像,则( )
A.物体M的密度为0.2×103kg/m3
B.当传感器示数为0N时,加水质量为1.4kg
C.当加水质量为1.8kg时,容器对桌面的压强为1900Pa
D.加水质量为2kg时,水对水箱底部的压力为31N
【解答】解:
AB.由图乙可知,水箱中没有水时(m=0),力传感器的示数为F0=6N(即细杆a的上端受到的拉力为6N),
由杠杆的平衡条件可得F0×OA=GM×OB,则GM=OAOBF0=13×6N=2N;
设M的底面积为S,压力传感器示数为0时M浸入水中的深度为h1,M的高度为h,
当压力传感器的压力为零时,M受到的浮力等于M的重力2N,由阿基米德原理可得ρ水gSh1=2N﹣﹣﹣①
由图乙可知,当M完全浸没时,压力传感器的示数为24N,
由杠杆的平衡条件可得FA×OA=FB×OB,则FB=OAOBFA=13×24N=8N,
对M受力分析可知,受到竖直向上的浮力、竖直向下的重力和杆的作用力,
则此时M受到的浮力:F浮=GM+FB=2N+8N=10N;
由F浮=ρ液gV排可得,所以M的体积:
VM=V排=F浮ρ水g=10N1.0×103kg/m3×10N/kg=1×10﹣3m3,
物体M的密度:
ρM=mMVM=0.2kg1×10−3m3=0.2×103kg/m3;
由阿基米德原理可得:ρ水gSh=10N﹣﹣﹣﹣﹣﹣﹣②
由①和②得:h=5h1,
由图乙可知,加水1kg时水面达到M的下表面(此时浮力为0),加水2kg时M刚好浸没(此时浮力为10N),该过程中增加水的质量为1kg,浮力增大了10N,
所以,每加0.1kg水,物体M受到的浮力增加1N,当向水箱中加入质量为1.4kg的水时,受到的浮力为4N,B端受到的力4N﹣2N=2N,此时杠杆处于平衡状态,则传感器受力不为0N,故A正确,B错误;
C.由选项B可知,每加0.1kg水,物体M受到的浮力增加1N,加水1kg时水面达到M的下表面,加水质量为1.8kg时,浮力为8N,
物体M受到细杆b向下的压力:FB′=F浮′﹣GM=8N﹣2N=6N,
水箱对水平面的压力:F=(m水箱+m水+mM)g+FB′=(0.8kg+1.8kg+0.2kg)×10N/kg+6N=34N,
容器对桌面的压强为:p=FS=34N200×10−4m2=1700Pa,故C错误;
D.加水质量为2kg时,M刚好完全浸没,由选项B可知此时M受到的浮力是10N,由阿基米德原理可知排开水的重力是10N,
水对水箱底部的压力:F压=G水+G排=m水g+G排=2kg×10N/kg+10N=30N,故D错误。
故选:A。
4.如图所示为建筑工地上常用的吊装工具,物体M是重5000N的配重,杠杆AB的支点为O,已知长度OA:OB=1:2,滑轮下面挂有建筑材料P,每个滑轮重100N,工人体重为700N,杠杆与绳的自重、滑轮组摩擦均不计。当工人用300N的力竖直向下以1m/s的速度匀速拉动绳子时( )
A.建筑材料P上升的速度为3m/s
B.物体M对地面的压力为5000N
C.工人对地面的压力为400N
D.建筑材料P的重力为600N
【解答】解:
A、物重由2段绳子承担,建筑材料P上升的速度v=12v绳=12×1m/s=0.5m/s,故A错误;
B、定滑轮受向下的重力、3段绳子向下的拉力、杠杆对定滑轮向上的拉力,由力的平衡条件可得:FA′=3F+G定=3×300N+100N=1000N;
杠杆对定滑轮的拉力和定滑轮对杠杆的拉力是一对相互作用力,大小相等,即FA=F′A=1000N;
根据杠杆的平衡条件:FA×OA=FB×OB,且OA:OB=1:2,
所以,FB=FA×OAOB=1000N×OA2OA=500N;
因为物体间力的作用是相互的,所以杠杆对物体M的拉力等于物体M对杠杆的拉力,即FB′=FB=500N;
物体M受竖直向下的重力、竖直向上的支持力、竖直向上的拉力,则物体M受到的支持力为:FM支持=GM﹣FB′=5000N﹣500N=4500N,
因为物体间力的作用是相互的,所以物体M对地面的压力:FM压=FM支持=4500N.故B错误;
C、当工人用300N的力竖直向下拉绳子时,因力的作用是相互的,则绳子对工人会施加竖直向上的拉力,其大小也为300N,
此时人受竖直向下的重力G、竖直向上的拉力F、竖直向上的支持力F支,由力的平衡条件可得:F+F支=G,则F支=G﹣F=700N﹣300N=400N,
因为地面对人的支持力和人对地面的压力是一对相互作用力,大小相等,所以工人对地面的压力:F压=F支=400N,故C正确;
D、由图可知n=2,且滑轮组摩擦均不计,由F=12(G+G动)可得,建筑材料P重;G=2F﹣G动=2×300N﹣100N=500N,故D错误;
故选:C。
5.如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟直杆垂直且作用于OB中点的力F,使直杆由竖直位置慢慢转到水平位置,在这个过程中这个直杆( )
A.始终是省力杠杆
B.始终是费力杠杆
C.先是省力杠杆,后是费力杠杆
D.先是费力杠杆,后是省力杠杆
【解答】解;由图可知动力F的力臂始终保持不变,物体的重力G始终大小不变,在杠杆从竖直位置向水平位置转动的过程中,重力的力臂逐渐增大,在L2<L1之前杠杆是省力杠杆,在L2>L1之后,杠杆变为费力杠杆。
故选:C。
6.如图所示,一根可绕O点转动的均匀硬棒重为G,在棒的一端始终施加水平力F,将棒从图示位置缓慢提起至虚线位置的过程中( )
A.F的力臂变小,F的大小变大
B.F的力臂变大,F的大小变小
C.重力G与它的力臂乘积保持不变
D.重力G与它的力臂乘积变大
【解答】解:在棒的一端始终施加水平力F,将棒从图示位置缓慢提起至虚线位置的过程中,根据力臂的定义可知,F的力臂变大,重力G的力臂减小;根据杠杆的平衡条件FL=GL'可知,重力不变,重力的力臂减小,则重力与重力的力臂的乘积减小,动力臂变大,故动力F减小,故B正确,ACD错误。
故选:B。
7.如图,一块厚度、密度均匀的长方形水泥板放在水平地面上,用一竖直向上的力分别作用于水泥板的长或宽的一侧,欲使其一端拎离地面。下列对此情景的分析中,正确的是( )
A.F甲=F乙,因为动力臂都是阻力臂的2倍
B.F甲>F乙,因为甲方法的动力臂比乙方法的短
C.F甲作用于水泥板时,水泥板可看成是费力杠杆
D.F乙作用于水泥板时,水泥板可看成是费力杠杆
【解答】解:A、两次抬起水泥板时,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以阻力臂都等于动力臂的二分之一,即动力臂都是阻力臂的2倍,故A正确;
B、甲的动力臂短,阻力臂也短,根据杠杆的平衡条件可得:F=GL阻L动=G×12L动L动=12G,F甲不会大于F乙,故B错误;
CD、F甲和F乙作用于水泥板时,动力臂都大于阻力臂都为省力杠杆,故CD错误。
故选:A。
8.如图所示,分别用F1、F2和F3作用在杠杆上(始终竖直的力F1、始终与杠杆垂直的力F2、始终水平的力F3),将杠杆缓慢地由实线位置拉到水平位置时,下列说法正确的是( )
A.这三个力都逐渐变大
B.这三个力都逐渐变小
C.F1、F2逐渐变大、F3大小不变
D.F2、F3逐渐变大、F1大小不变
【解答】解:(1)如图所示:
根据图示可知,杠杆原来位置的动力臂为LOA,阻力臂为LOD;杠杆在水平位置时,动力臂为LOC
,阻力臂为LOB;
根据直角三角形中边的关系可知,LOD:LOA=LOC:LOB;
由杠杆平衡的条件可得:F=L2L1G;由于力臂的比值不变,重力不变,因此拉力F1始终不变。
(2)根据杠杆平衡条件F1L1=F2L2分析,将当用始终垂直杠杆的力F1将物体提升至水平位置的过程中,动力臂不变,阻力不变,阻力力臂变大,所以动力F2变大;
(3)将杠杆缓慢地由位置A拉到位置B,阻力G的力臂变大,而阻力不变;
力F作用在杠杆一端且始终是水平方向,即方向不变,所以动力臂变小,
根据杠杆平衡条件F1L1=F2L2分析得出动力F3变大。
故选:D。
9.如图所示,利用轻质滑轮组匀速拉动水平地面上重为300N的物体,拉力F的大小为30N,若物体和地面之间的摩擦力大小为45N,则A处的拉力大小和滑轮组的机械效率分别为( )
A.45N、50% B.45N、75% C.60N、50% D.60N、75%
【解答】解:
(1)物体在水平地面上做匀速运动,则此时A处绳子的拉力与物体与地面之间的摩擦力是一对平衡力,
∵物体和地面之间摩擦力为f=45N,
∴A处的拉力大小为FA=f=45N。
(2)从图可知,由2段绳子与动滑轮相连,则s=2s物,
∵F=30N,f=45N,
∴滑轮组的机械效率为:η=W有用W总=fs物FS=fs物F×2×s物=f2Fη=45N2×30N=75%。
故选:B。
10.如图所示,甲、乙、丙三个小和尚抬着一根长木头向寺庙走去,甲和尚抬着较粗的一端,乙和尚抬着木头的中间部位,丙和尚抬着较细的一端。则下列判断正确的是( )
A.当丙由于肩膀酸痛而撤掉作用力后,甲的负担顿时变轻,乙的负担顿时加重
B.当乙由于肩膀酸痛而撤掉作用力后,甲的负担顿时变重,丙的负担顿时变轻
C.当乙的作用力减小时,甲、丙两人的作用力均增加,但△F甲>△F丙
D.当甲的作用力增加时,乙、丙两人的作用力均减小,但|△F乙|<|△F丙|
【解答】解:
A、当丙由于肩膀酸痛而撤掉作用力后,如下图,
若以A为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F丙去掉,要增大F乙,乙的负担顿时加重;
若以B为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F丙去掉,减小F甲,甲的负担顿时变轻;故A正确;
B、当乙由于肩膀酸痛而撤掉作用力后,如下图,
若以A为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F乙去掉,要增大F丙,丙的负担顿时加重;
若以C为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F乙去掉,甲的负担顿时变重;故B错;
C、当乙的作用力减小时,如下图,
若以A为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,减小的力和力臂乘积相等,F丙的力臂等于F乙的力臂的2倍,所以△F丙=12△F乙;
若以C为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,减小的力和力臂乘积相等,F甲的力臂等于F乙的力臂的2倍,所以△F甲=12△F乙;所以△F甲=△F丙,故C错误;
D、当甲作用力增加时,如下图,
若以B为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F甲增大,F丙也增大,△F甲=△F丙;
若以C为支点,阻力和阻力臂不变,动力臂不变,由杠杆平衡条件可知,F甲增大,F乙减小,F甲的力臂等于F乙的力臂的2倍,所以△F甲=12△F乙;|△F乙|>|△F丙|;故D错。
故选:A。
11.如图所示,在“研究杠杆的平衡条件”的实验中,若实验时在杠杆的左端悬挂一个物体,右端用弹簧秤拉着,使杠杆在水平位置保持平衡,今握着弹簧秤缓慢地沿图中虚线的位置1移动到2(杠杆始终在水平位置保持平衡),则弹簧秤的示数( )
A.不断增大 B.先增大,后减小
C.不断减小 D.先减小,后增大
【解答】解:1、2位置施力的力臂如图所示,当施加的动力垂直于杠杆时,动力臂最长,
∵杠杆始终在水平位置保持平衡,阻力和阻力臂一定,
∴此时的动力最小,
∴从位置1移动到2的过程中,动力F先减小再增大。
故选:D。
12.2020年1月14日,宁波三官堂大桥最后一节超大节段钢结构焊接完成,标志着大桥实现合龙。合龙段焊接缝的精度要求为1cm,而结构长度受温度的影响很大,每变化1.5℃就会影响合龙段间隙1cm,所以必须要等到结构预制时计算的气温才可以精准合龙。为了等待最佳的“天时”,施工人员守候了整整3天。如图是当时的场景照片,结合所学知识,判断下列说法不正确的是( )
A.气温是描述天气状况的因素之一
B.拉住锻钢的滑轮组起到了省力杠杆的作用
C.钢段向上运动时,滑轮组的机械效率不断提高
D.锻钢离开船体后,船底部受到的液体压强比锻钢离开前小
【解答】解:
A.气温是描述天气状况的因素之一,故A正确;
B.拉住锻钢的滑轮组能省力,起到了省力杠杆的作用,故B正确;
C.钢段向上运动时,由于动滑轮和物体重力保持不变,根据公式η=W有用W总=GℎGℎ+G动ℎ=GG+G动可知,滑轮组的机械效率保持不变,故C错误;
D.锻钢离开船体后,船体的重力减小,根据F浮=G可知,船体受到的浮力减小;根据阿基米德原理F浮=ρ水gV排可知,船体排开水的体积变小,那么船底到水面的深度减小;根据公式p=ρgh可知,船底部受到的液体压强比锻钢离开前小,故D正确。
故选:C。
二.填空题(共3小题)
13.图甲是一种市场上使用率较高的易拉罐内嵌式拉环,图乙是简化后的模型。O点是铆接点,拉动拉环A点时会绕O点转动。AB长为2.4cm,OB为0.6cm。如图所示,作用在B点的力达到15N时,可以将封口顶开。
(1)拉开拉环所需最小的力F是 5 牛。
(2)若拉环与手指的接触面积为40mm2,则作用在手指上的压强为 1.25×105 帕。
【解答】解:(1)根据题意可知,阻力臂为OB=0.6cm,阻力F′=15N,
当在A点拉动拉环时,动力臂最长,力最小,此时动力臂为OA=AB﹣OB=2.4cm﹣0.6cm=1.8cm,
根据杠杆平衡条件F1L1=F2L2可得,拉开拉环所需最小的力:F=F'L'L=15N×0.6cm1.8cm=5N;
(2)根据力的作用的相互性可知,作用在手指上的压力等于拉开拉环所需最小的力,即F压=F=5N,
受力面积S=40mm2=40×10﹣6m2,
则作用在手指上的压强:p=F压S=5N40×10−6m2=1.25×105Pa。
故答案为:(1)5;(2)1.25×105。
14.小明家有个木衣架,他将书包挂在衣架的A处,衣架倒了下来。他分析了衣架倒下来的原因,并测量了以下的数据:木衣架质量3kg;圆底盘直径30cm;其他数据如图所示,衣架受到重力的作用线经过圆底盘的圆心。分析木衣架会倒的原因时,可以把它看成 杠杆 。通过分析,小明认为防止衣架倒下来可以采取以下措施:控制所挂书包的质量不允许超过 4.5 kg,或者适当 增大 圆底盘直径。
【解答】解:(1)分析木衣架会倒的原因时,可以把它看成杠杆;
木衣架的重力:G2=m2g=3kg×10N/kg=30N;
圆盘的半径为30cm2=15cm,由图知,以底盘右侧点为支点,
书包对衣架力和力臂的乘积=F1L1=F1×(25cm﹣15cm);
衣架自身重力和力臂的乘积=F2L2=30N×15cm;
根据F1L1=F2L2,可得F1×(25cm﹣15cm)=30N×15cm;
解得F1=45N,
则书包的质量m=G1g=F1g=45N10N/kg'=4.5kg;
(2)由题意知,衣架倾倒的原因是两边力和力臂的乘积不相等造成的,所以要防止其倾倒,可减小挂物与其力臂的乘积或增大自重与其力臂的乘积,故可减小挂衣钩的长度、或增大底盘的直径、或圆盘底座换用大理石等密度更大的材料、或在挂衣钩的对侧挂物品等。
故答案为:杠杆;4.5;增大。
15.如图所示,置于水平桌面上的物体A重490N,物体B重294N,物体B在匀速下降了40cm的过程中,拉动物体A在水平桌面上匀速移动了一段距离;若用一水平向左的力F拉动物体A,使物体A在5s内匀速移动0.5m(不计动滑轮、绳重以及滑轮轮轴间摩擦),则拉力F为 294 N,绳子拉力对物体B所做的功为 73.5 J,物体A与桌面的滑动摩擦力为 147 N。
【解答】解:(1)由图知,承担物重的绳子股数是2,绳子自由端的拉力:F′=GB2=294N2=147N。
物体A匀速运动,拉力和摩擦力是一对平衡力,物体A所受摩擦力:f=F′=147N。
(2)用一水平向左的力F拉动物体A,拉力:F=f+F′=147N+147N=294N;
(3)绳子拉力对物体B所做的功:W=GBh=GB×s2=294N×0.5m2=73.5J。
故答案为:294;73.5;147。
三.计算题(共3小题)
16.如图所示是一种起重机的示意图。起重机重2.4×104N(包括悬臂),重心为P1,为使起重机起吊重物时不致倾倒,在其右侧配有重M(重心为P2)。现测得AB为10m,BO为1m,BC为4m,CD为1.5m。
(1)若该起重机将重物吊升6m,用时50s,则重物上升的平均速度是多少?
(2)现在水平地面上有重为2.44×104N的货箱,若要吊起此货箱,起重机至少需加重量为多少的配重?
(3)该起重机最大配重量是多少?
【解答】解:(1)重物上升的平均速度:v=st=6m50s=0.12m/s;
(2)若要吊起此货箱,起重机对货箱的拉力:F拉′=G=2.44×104N,
支点为B,配重的力臂:BD=BC+CD=4m+1.5m=5.5m,
根据杠杆平衡条件可得:F拉′×AB=G起重机×BO+G配重×BD,
即:2.44×104N×10m=2.4×104N×1m+G配重×5.5m,
解得:G配重=4×104N;
(3)不起吊物体时,支点为C,
起重机自重的力臂:OC=BC﹣BO=4m﹣1m=3m;配重的力臂:CD=1.5m。
根据杠杆平衡条件可得:G起重机×OC=G配重′×CD,
即:2.4×104N×3m=G配重′×1.5m,
解得最大配重:G配重′=4.8×104N。
答:(1)重物上升的平均速度是0.12m/s;
(2)起重机至少需加重量为4×104N的配重;
(3)该起重机最大配重量是4.8×104N。
17.如图所示,花岗岩石块甲、乙体积之比为12:3,将它们分别挂在轻质硬棒AB的两端,当把石块甲浸没在水中时,硬棒恰能水平位置平衡。然后将甲石块从水中取出,拭干后浸没在液体丙中,调节石块乙的位置到C处时,硬棒在水平位置再次平衡,且OC=2OA.(已知花岗岩的密度ρ=2.6×103kg/m3),求:
(1)AO:OB;
(2)液体丙的密度。
【解答】解:(1)设甲的体积为12V,乙的体积为3V.当把石块甲浸没在水中时,硬棒恰能水平位置平衡。
则根据杠杆的平衡条件:
(G甲﹣F浮)•AO=G乙•OB
即:(ρg12V﹣ρ水g12V)•AO=ρg3V•OB
代入数据得(2.6×103kg/m3×g×12V﹣1.0×103kg/m3×g×12V)×OA=2.6×103kg/m3×g×3V×OB ①
由①得AO:OB=13:32;
(2)将甲浸没在液体丙中,硬棒在水平位置再次平衡,
则根据杠杆的平衡条件得:
(ρg12V﹣ρ液g12V)•AO=ρg3V•OC
代入数据得(2.6×103kg/m3×g×12V﹣ρ液×g×12V)×OA=2.6×103kg/m3×g×3V×OC ②
根据已知条件得:OC=2OA ③
由②③得,液体丙的密度为ρ液=1.3×103kg/m3
答:(1)AO:OB=13:32;
(2)液体丙的密度是1.3×103kg/m3。
18.如图所示,斜面长s=1.5m,高h=0.3m。建筑工人将重G=480N的货物箱,用绳子从地面匀速拉到顶端时,沿斜面向上的拉力F=150N,忽略绳子重力。求:
(1)该过程拉力F做的功;
(2)该装置的机械效率;
(3)货物箱在斜面上受的摩擦力大小。
【解答】解:(1)该过程拉力F做的功:
W总=Fs=150N×1.5m=225J;
(2)有用功:
W有=Gh=480N×0.3m=144J,
该装置的机械效率:
η=W有用W总×100%=144J225J×100%=64%;
(3)额外功:
W额=W总﹣W有=225J﹣144J=81J,
由W额=fs可得,货物箱在斜面上受的摩擦力大小:
f=W额s=81J1.5m=54N。
答(1)拉力做的功为225J;
(2)斜面的机械效率为64%;
(3)物体受到的摩擦力为54N。
四.综合能力题(共2小题)
19.如图所示为测液体密度的密度秤示意图,轻质杆AB长为40cm,可绕O点转动(轻质杆与O点之间的摩擦忽略不计),其左端A点挂一个质量为0.2kg,容积为200mL的桶,AO=10cm;在O点的右侧用轻质细绳悬挂一个质量为0.2kg的秤砣,秤砣可沿OB左右滑动。使用时,在桶中装满待测液体,移动秤砣使密度秤再次水平平衡,读出相应位置的刻度值即可。
(1)密度秤零刻度在O点右侧 10 cm处。
(2)该密度秤所能测量的最大密度是多少?
(3)判断该密度秤的刻度是否均匀(通过推导说明)。
【解答】解:(1)当小桶为空桶时移动秤砣至某点,设该点为E,此时密度秤正好水平平衡,
小桶的质量为0.2kg,秤砣的质量为 0.2kg,左侧的力臂为AO=10cm,
则杠杆平衡条件F1L1=F2L2得:G桶OA=G砣OE,
即:m桶gOA=m砣gOE,
所以,OE=m桶OAm砣=0.2kg×10cm0.2kg=10cm,即密度秤零刻度在O点右侧10cm处;
(2)0.4m=40cm;
当右侧的力臂为OB=AB﹣OA=40cm﹣10cm=30cm时,该密度秤小桶所能测量液体的质量最大,则密度就最大,
根据杠杆平衡条件F1L1=F2L2得,
(G桶+G液体)OA=G砣OB,
即:(m桶+m液)gOA=m砣gOB﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣,
则:液体的质量m液=OBOAm砣﹣m桶=30cm10cm×0.2kg﹣0.2kg=0.4kg=400g,
所以,液体的最大密度:ρ液最大=mV=400g200cm3=2g/cm3=2×103kg/m3。
(3)液体的密度:ρ液=m液V=L砣OAm砣−m桶V=L砣OA⋅Vm砣−m桶V;由此可知:液体密度与提钮到秤舵的距离之间的关系是一次函数,因此密度秤的刻度是均匀的。
故答案为:(1)10;(2)液体的最大密度是2×103kg/m3;(3)液体的密度:ρ液=m液V=L砣OAm砣−m桶V=L砣OA⋅Vm砣−m桶V;由此可知:液体密度与提钮到秤舵的距离之间的关系是一次函数,因此密度秤的刻度是均匀的。
20.如图所示,小金想利用滑轮组用最省力的绳子绕法水平匀速拉动物体A.若地面对A的摩擦力与A的重力的比值为n,A的比热为c,A的温度上升t。(为计算方便,假设摩擦产生的热都被A吸收)
(1)在答题卷的图中画出滑轮组上绳子的绕法。
(2)在用绳子水平匀速拉动物体A的过程中,若不计绳子与滑轮之间的摩擦和自重,拉力做的功 等于 物体A克服摩擦做的功(选填大于,小于或等于)
(3)已知物体受到的滑动摩擦力和物体间相对滑动的距离的乘积,在数值上等于滑动过程产生的内能,试推导绳子末端移动的距离s= 3ctng (请写出推导过程,所得结果用字母表示)
【解答】解:(1)由图可知,该滑轮组由一个动滑轮和一个定滑轮组成,当连接动滑轮绳子的段数最多为3段时,此时最省力,如图所示:
;
(2)不计绳子与滑轮之间的摩擦和自重,则拉力所做的功全部用在物体A上,即拉力做的功等于物体A克服摩擦做的功;
(3)由题意可得fG=n,则地面对A的摩擦力f=nG,
设物体移动的距离为s′,则克服摩擦做功,转化为内能的大小为:W=fs′=nGs′=nmgs′;
物体A吸收的热量:Q=cmt,
由题知,摩擦产生的热都被A吸收,则nmgs′=cmt,
解得:s′=ctng,
连接动滑轮绳子的段数为3段,绳子移动的距离为物体移动距离的三倍,
则绳子末端移动的距离s=3ctng。
故答案为:(1)如上图;(2)等于;(3)3ctng。
相关学案
中考科学 二轮专题 专题34 金属 学案: 这是一份中考科学 二轮专题 专题34 金属 学案,共24页。学案主要包含了思维导图,知识点回顾,例题精析,习题巩固等内容,欢迎下载使用。
中考科学 二轮专题 专题24 电和磁 学案: 这是一份中考科学 二轮专题 专题24 电和磁 学案,共21页。学案主要包含了思维导图,知识点回顾,例题精析,习题巩固等内容,欢迎下载使用。
中考科学 二轮专题 专题18 浮力 学案: 这是一份中考科学 二轮专题 专题18 浮力 学案,共25页。学案主要包含了思维导图,知识点回顾,例题精析,原理分析,问题提出,方案设计,数据处理,交流分析等内容,欢迎下载使用。